2021 Robotics Student Fellows

Research Overview

During the fellowship, I worked together with the Vision for Robotics lab (V4RL), which aims to give robots, specifically drones, the ability to perceive the environment with the help of vision. The project was motivated by the need of safe landing strategies in the context of drone delivery in busy environments, in which moving objects are largely present. In order to do so, the drone is equipped with a map of the environment and must be capable of detecting and tracking the dynamic objects in the scene. In this project we developed a map of the dynamic objects of the scene as a grid map of the probability distribution of each space cell to be occupied. This map is aimed to be generated for the prediction of the state of the dynamic environment in the nearest future in order for the drone to choose a safe zone to land. Several probabilistic methods of tracking and prediction have been considered and tried such as the Kalman filter and particle filter.

Research Overview
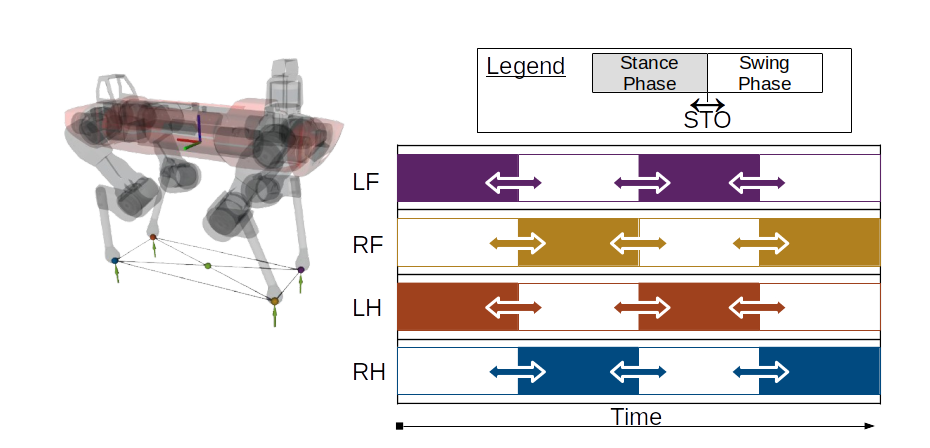
Developments in legged robotics will enable the deployment of robotic systems in extreme and unstructured environments due to their ability to transverse challenging terrain. However, controlling these highly-articulated systems involves a core challenge: the nonlinearity and high dimensionality of their dynamics come in conflict with the requirements for accuracy and faster than real-time performance. To overcome these challenges, the optimal control problem can be formulated using numerical optimization techniques for switched systems. On one hand, the switched system model captures the impulsive nature of a legged robot's contact with the ground or interaction with the environment. On the other hand, the efficiency of existing optimization methods enable real-time computation. However, limited research has been conducted on the extension of such methods for Switching Time Optimization (STO). STO waives the requirement for a predefined gait, and improves the complexity of the resulting motions and thus the controller's performance over difficult terrain. Hence, the goal of this work involves a formulation of an STO approach using optimization methods for quadrupedal locomotion. Overall, the derivation, implementation and simulation results will constitute the project outcomes. This work has been conducted as part of ANYmal Research, a community to advance legged robotics.

Research Overview
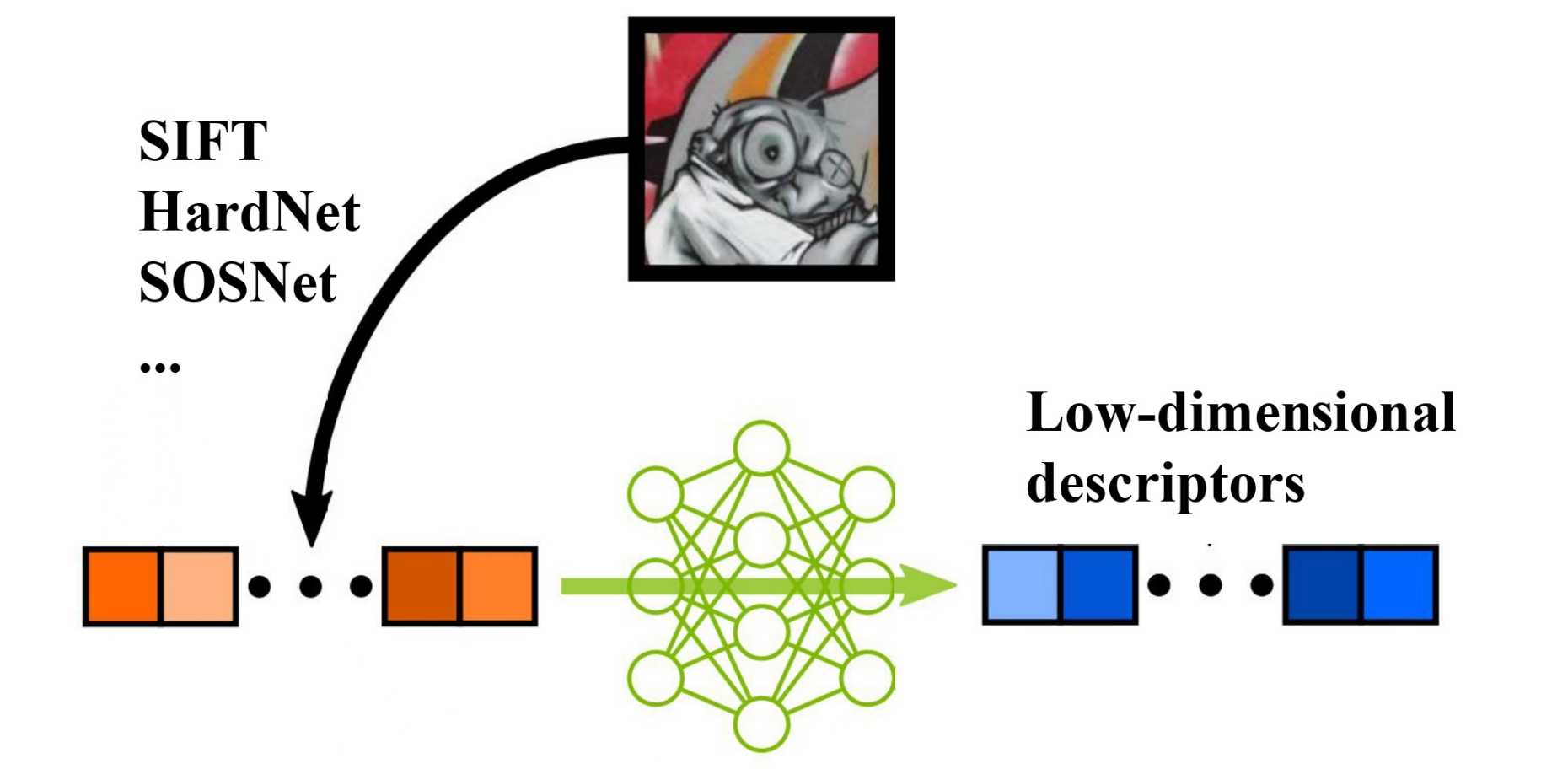
My research topic during the fellowship is Dimensionality Reduction Techniques for Local Feature Descriptors. A local feature consists of a keypoint as well as its associated descriptor generally extracted from a local patch around the keypoint. Local features are supposed to be robust to rotation, viewpoint and photometric changes to establish correspondences between different views reliably. Even lots of end-to-end learning work appears in computer vision research, local features still play an important role in tasks such as image retrieval, visual localization, SLAM, etc. Most popular image features have high dimensionality of descriptors, eg, 128. But do we really need such high-dimensional descriptors? In this work, I am using unsupervised, self-supervised, and supervised methods for dimensionality reduction in the context of local feature descriptors. The preliminary experiments show that the learned low-dimensional descriptors have increased accuracy and faster matching speed compared to the original ones.
"The RSF has allowed me to connect with many other great students and researchers that share my passion for robotics in the most ideal environment at ETH. My motivation has only kept increasing during these two months in which I have learned a myriad of things. Thanks to my supervisors and the organizers of this unforgettable program!"
Research Overview
The deployment of autonomous vehicles on public roads is currently one of the automotive industry's greatest investments. Thus, the development of reliable strategies that are able to mitigate injury severity in the case of inevitable collisions remains crucial. Extensive research has been conducted in the realm of motion planning to improve safety by providing efficient collision avoidance manoeuvres. However, ensuring vehicle safety in unavoidable traffic scenarios is still a major challenge. Therefore, our work focuses on developing an approach that allows the control system of the vehicle to select the optimal manoeuvre that will minimize the number of casualties and/or injuries of the involved vehicles occupants. To do this, we first develop a realistic 2D simulator that takes into account the dynamics of the involved vehicles, to test the different collision scenarios. Then, we compute the probability of having a casualty or injury based on parameters such as the velocity and direction of impact. Finally, we add these results to an appropriate cost function that performs the optimal path planning action.

Research Overview
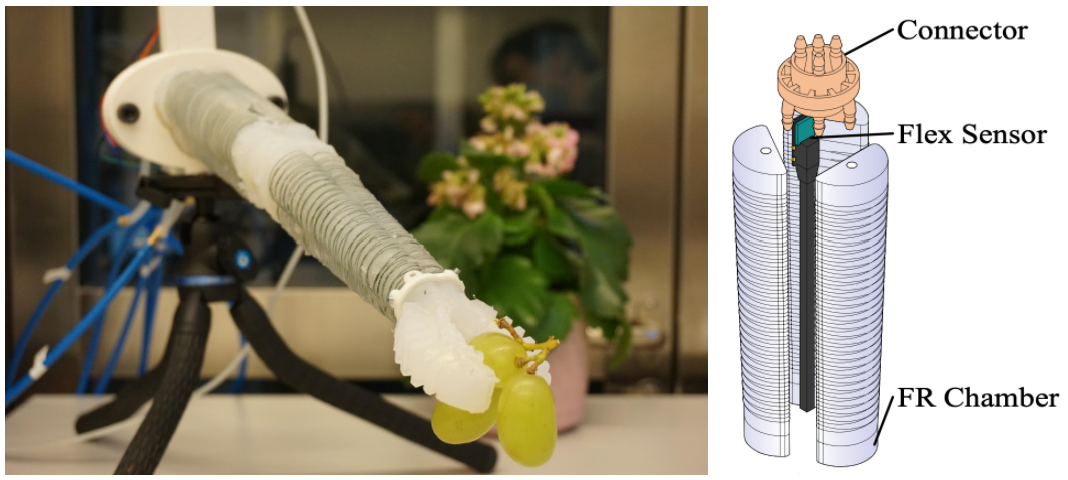
Soft robotics is an emerging sub-field of robotics that has gained much attention in recent years. As fabricated with compliant and deformable materials, soft robots can perform tasks that would be extremely challenging for conventional rigid robots. In particular, soft manipulators are interesting, as their inherent compliance makes them more suitable for human-robot interactions or compliant operations with the environment. Nevertheless, their continuum nature makes it also complicated to develop model-based control strategies. Although already established, the dynamic model of the soft robotic arm severely suffers from various uncertainties that arise from the poor approximation of the dynamic parameters, a reduced kinematic model, and unmodeled dynamics. As such, conventional state-feedback controllers display unsatisfactory performance, especially for the trajectory tracking during dynamic tasks. At Soft Robotics Lab, I am developing and implementing robust control approaches that can handle such uncertainties while fulfilling the dynamic tasks. In particular, I am working on robust control synthesis based on adaptive strategies that eliminate the need for prior information on the bound of uncertainties while maintaining robustness to input disturbances. This would be an essential feature of model-based control strategies for soft robotic arms, which would lead to accurate motion control of such robots.
"I will always remember the opportunity provided by RSF to conduct research at a place like ETH, to be able to meet and share knowledge with excellent people from such different backgrounds and a common passion for robotics. This experience has definitely been a big step in my research career! Thanks to my supervisors in the V4RL, the other fellow students and the organisers of this programme."

Research Overview
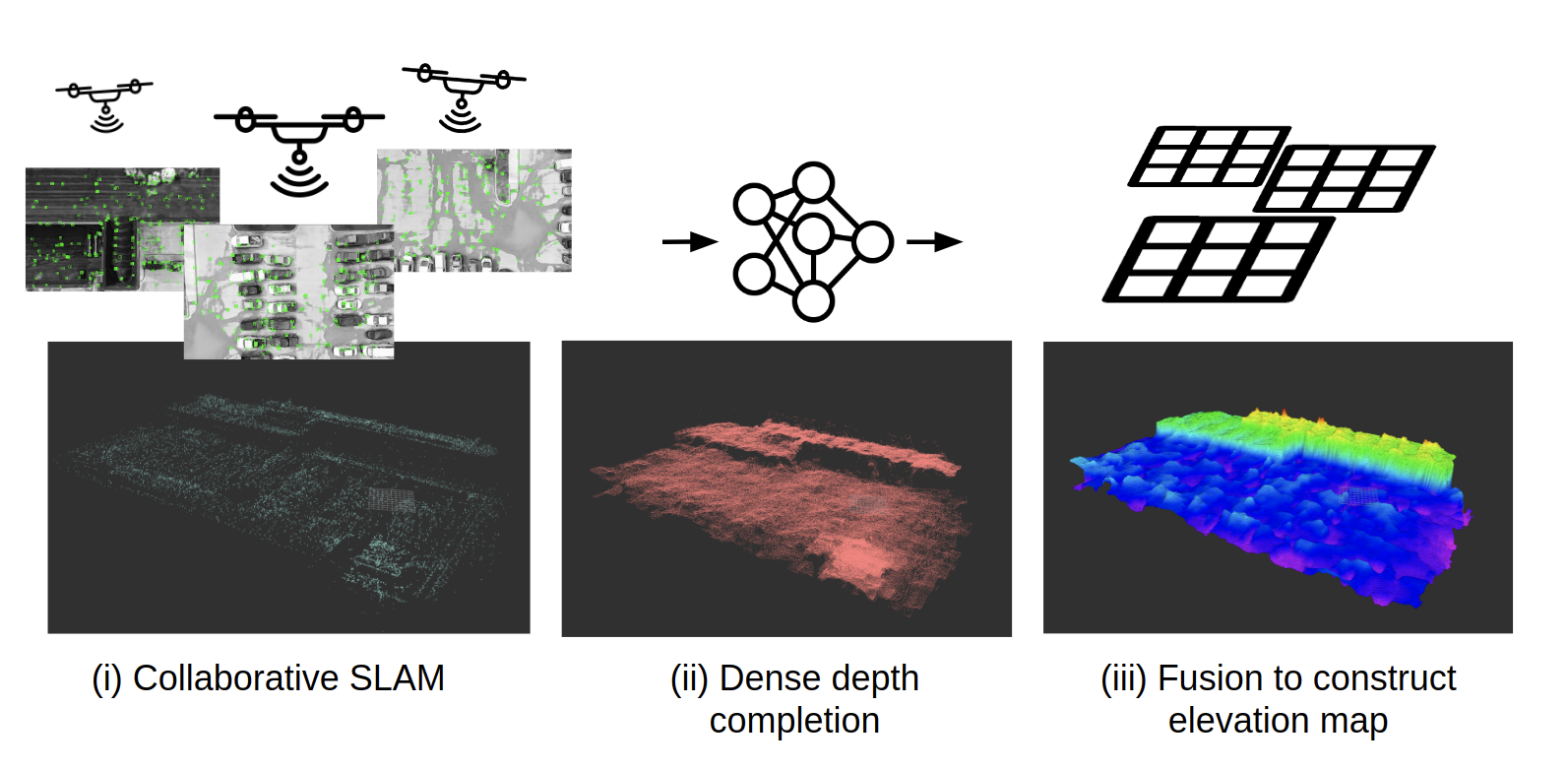
Simultaneous Localization and Mapping (SLAM) is a widely studied problem of creating a map at the same time as robots or agents locate themselves on it. The use of multi-robot systems in SLAM and obtaining maps with more than just geometric information remain as two open problems. The prior allows for faster and more robust systems as agents collaborate between them, which is vital in critical situations such as disaster scenarios. The latter leverages an obtained map to widen its applications, enabling high-level planning and reasoning. The goal of my project in the Vision for Robotics Lab (V4RL) was to create a dense elevation map from a collaborative SLAM system. I integrated different state-of-the-art techniques to (i) obtain a sparse elevation measure from the collaborative mapping system, (ii) complete the sparse measures using deep learning based depth completion and (iii) fuse the measurements to obtain the final map. All these problems were tackled under classical constraints of multi-robot systems, such as real-time performance and budged limited communication.

Research Overview
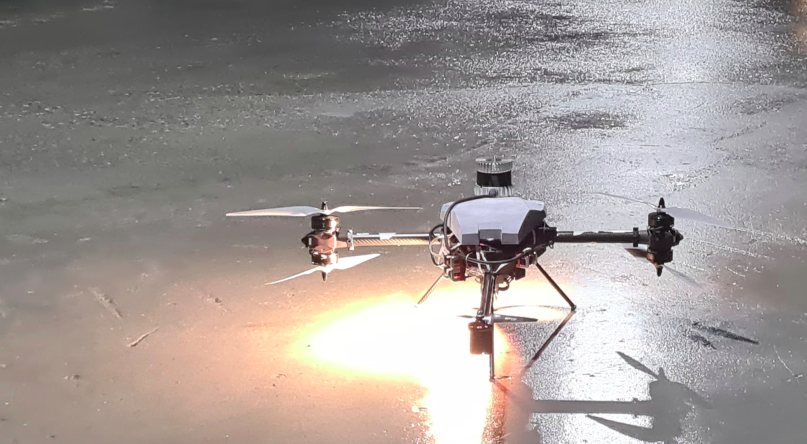
Robots are increasingly being considered for search and rescue applications due to their ability to autonomously carry out tasks that may not be feasible or safe for human rescuers. The DARPA Subterranean Challenge (DARPA-SubT) aims to put to the test state-of-the-art robotics research in an underground search and rescue setting. This is a very interesting challenge for robots due to the high level of autonomy needed in unknown underground environments with limited telecommunication. Furthermore, the impossibility of developing a “one-fits-all” robot means there is a need for multiple ground and aerial platforms to work together. For my robotics fellowship I’ve been working with a group from the Autonomous System Lab to develop an autonomous drone for DARPA-SubT. The Voliro drone is a tri-rotor aerial platform capable of rotating its body independently of its direction of motion, allowing flexible exploration and large sensor payloads. My work involved multiple core aspects: i) development of a feature which allows the robot to find a suitable local landing spot starting from a dynamic map representation, ii) development of in-flight safety monitoring tools, iii) an Ignition-Gazebo simulation model of the drone, and iv) participated in multiple field tests with the drone in underground environments.

Research Overview

Soft robotic exosuits such as the Myosuit are ideal for both supporting users with partial lower motor impairment during physical therapy and for improving their mobility in outdoor settings. Adding the restoration of sensory information to the motor support would allow subjects to walk more symmetrically and to have higher walking confidence. In this context, my work at the Sensory-Motor System Laboratory has been focused on the integration of the Myosuit with a non-invasive neurostimulation system based on TENS (Trans-cutaneous Electrical Nerve Stimulation), developed by the Neuroengineering Laboratory and previously tested on amputee patients (the NeuroLegs system). The integration is based on a bi-directional communication through multi-threading TCP sockets and the combination of those two systems into one single device. During the RSF, I have been able to control the stimulation parameters from the NeuroLegs system using the Myosuit’s data from 5 IMU sensors to provide a stimulation proportional to the knee angle. Moreover, the Myosuit can now access pressure data from the force sensors embedded in the NeuroLegs system. Finally, I had the opportunity to test the final device on a sensorized treadmill in order to verify the coherence of the electrical stimulation with respect to every phase of the human gait cycle.

Research Overview
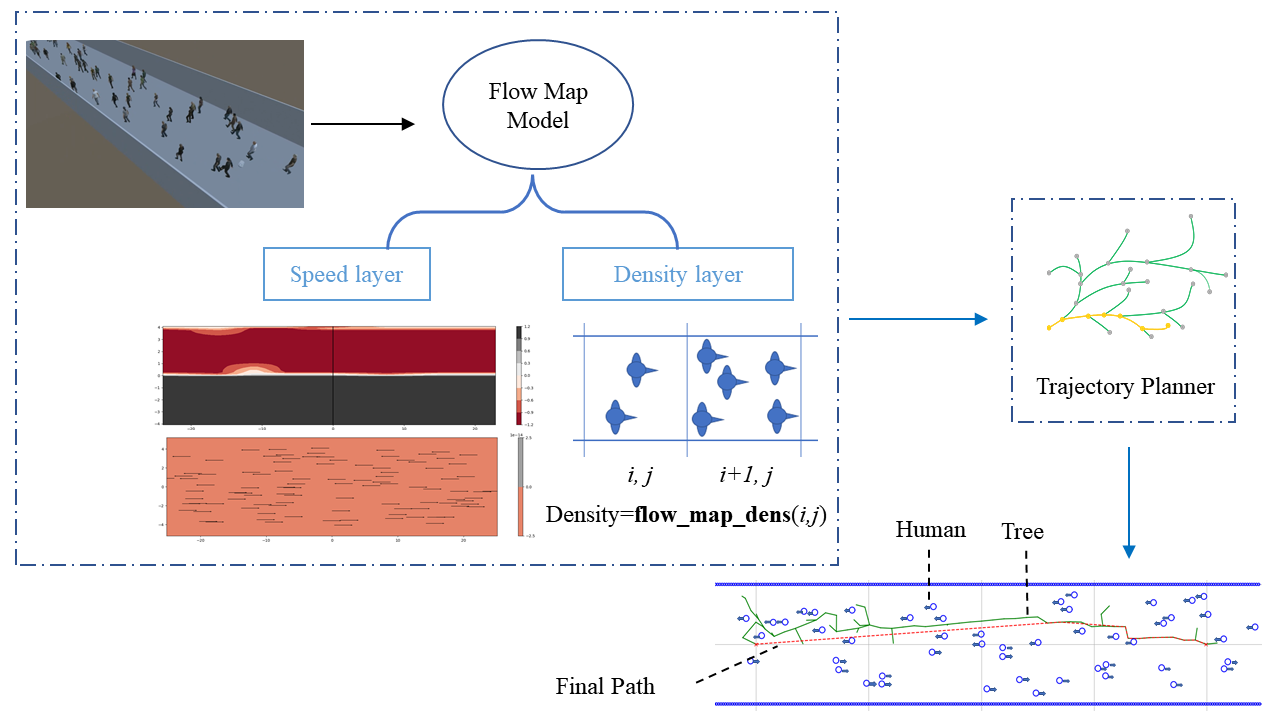
Human-aware navigation is essential for achieving harmonious coexistence between humans and robots. However, to generate a feasible path in highly dynamic crowded environments is a huge challenge for human-conscious robot navigation. During the fellowship, my research aims to develop a path planner that can efficiently navigate a robot to its goal through a crowded flow of pedestrians. Traditional planners struggle to find collision-free paths in such scenarios since the amount of free space is limited and always changing. In contrast to traditional planners, we are developing a flow map method that considers the velocity and density of the crowd using shear force and viscosity from fluid mechanics to build the constraints used by our novel sampling-based planning method. Our preliminary experiments show that the proposed method can generate efficient paths in crowded environments by taking into account the flow of the pedestrians.