2022 Robotics Student Fellows

Research Overview
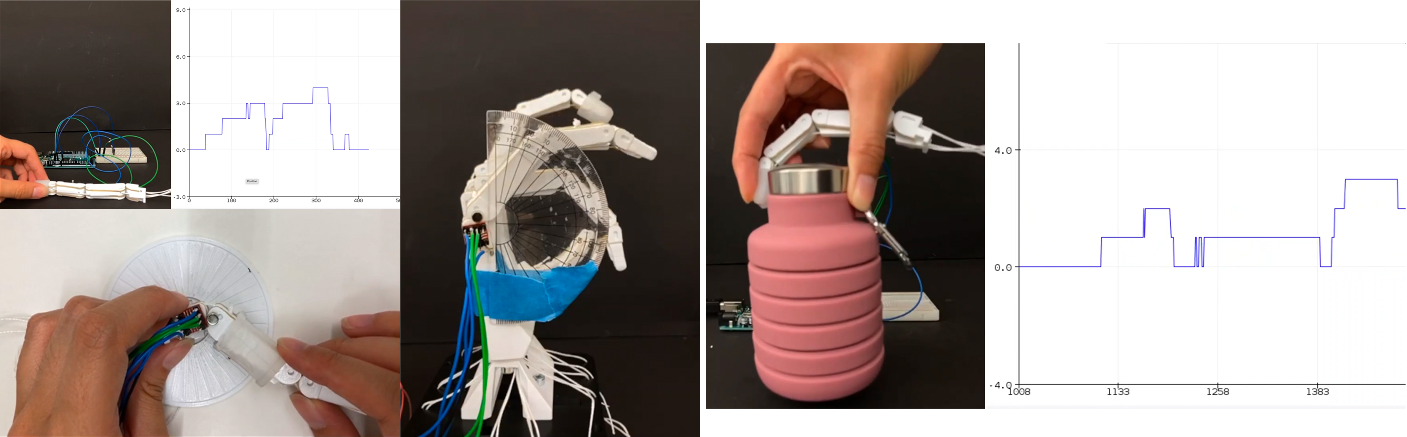
Robotic grippers are widely used in industry today for a variety of applications involving object manipulation. However, conventional robotic grippers lack versatility. Dexterous robotic hands are more capable but costly to manufacture and operate. At the Soft Robotics Lab, I assisted in the development of a robust versatile gripper that is inexpensive and easy to fabricate. The overall goal is to achieve automation of human-like tasks that are too complex for conventional grippers. One key component is to have a precise position and tactile sensor feedback for the control of the hand. In particular, I integrated position and tactile sensing into the fingers of the robotic hand. We tested different sensors to identify the one that provided the most accurate angle and force readings, respectively. Next steps involve closed loop control of the hand using the sensor feedback.

"I'd like to thank the RobotX initiative at ETH Zurich for providing me with the opportunity to conduct research and gain hands-on experience in a welcoming environment; joining an expert group and participating in collaborative research has been extremely educational and valuable for me, identifying areas for improvement and teaching me how to perform future independent research. I am sure that RSF can have a strong positive influence on my personal and professional development."
Research Overview
Even with fully-autonomous vehicles, unfortunate situations are statistically bound to happen. Minimizing the damage when a collision is unavoidable can hardly be reduced to a scalar number. It requires taking into account not only velocities and angles of impact, but also the position of passengers (if any), the highly non-linear dynamics of the emergency maneuvers, and liability issues.
On the other hand, ordinary motion planners mostly adopt simplistic kinematic vehicle models coupled with emergency subroutines similar to the ones provided by ADAS systems, which consider only simple behaviors, e.g., "slam on the brake". In contrast, an emergency motion planner should generate feasible, highly dynamic maneuvers that utilize the physical limitations of the vehicle, attempting to minimize severity risk.
At Frazzoli’s Lab, we are developing simulation tools that aim to contribute to the assessment and mitigation of risk for AVs. In particular, I am comparing in simulation standard approaches against a more "complete" method that performs trajectories rollouts in an emergency situation, and chooses the optimal one in terms of severity mitigation. Through these tools, we are quantifying the expected safety increase of such an emergency motion planner.

Research Overview
Point cloud registration is the process of finding the rigid transform that best aligns two point clouds, and it plays an essential role in robotics for tasks such as localization or SLAM.
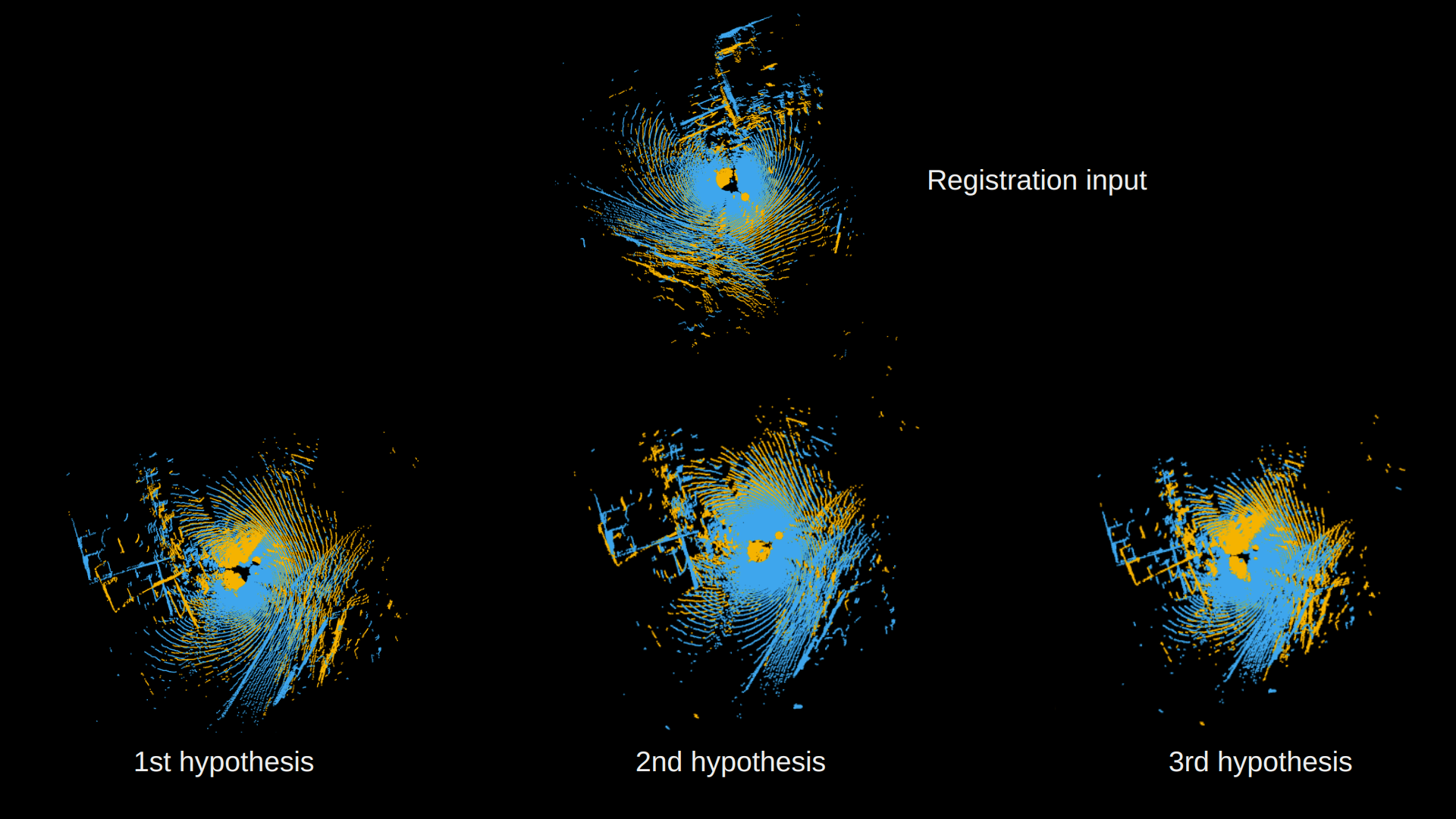
During my fellowship, I worked on PHASER, a global registration algorithm based on spectral analysis developed at Autonomous Systems Lab. The original implementation finds the best registration estimate by extracting the transformation that maximizes the correlation score between the point clouds. However, this method can fail in some cases, such as when repetitive and ambiguous patterns are present in the environment. In these scenarios, the correlation function could have multiple maxima, indicating numerous possible solutions or that no single solution registers the cloud.
My project aimed to extend this algorithm to output multiple registration hypotheses based on the local maxima of the correlation function. A preliminary evaluation of the work shows that in some cases, the original algorithm fails while the multi-hypothesis method can still find a solution to the problem.

"I really enjoyed working at the Sensory Motor Systems Lab! Collaborating with a highly committed research community, together with the atmosphere of Zurich, was a unique experience. I give thanks to the organizers of the program as well as my mentors, who guided me during this research internship."
Research Overview
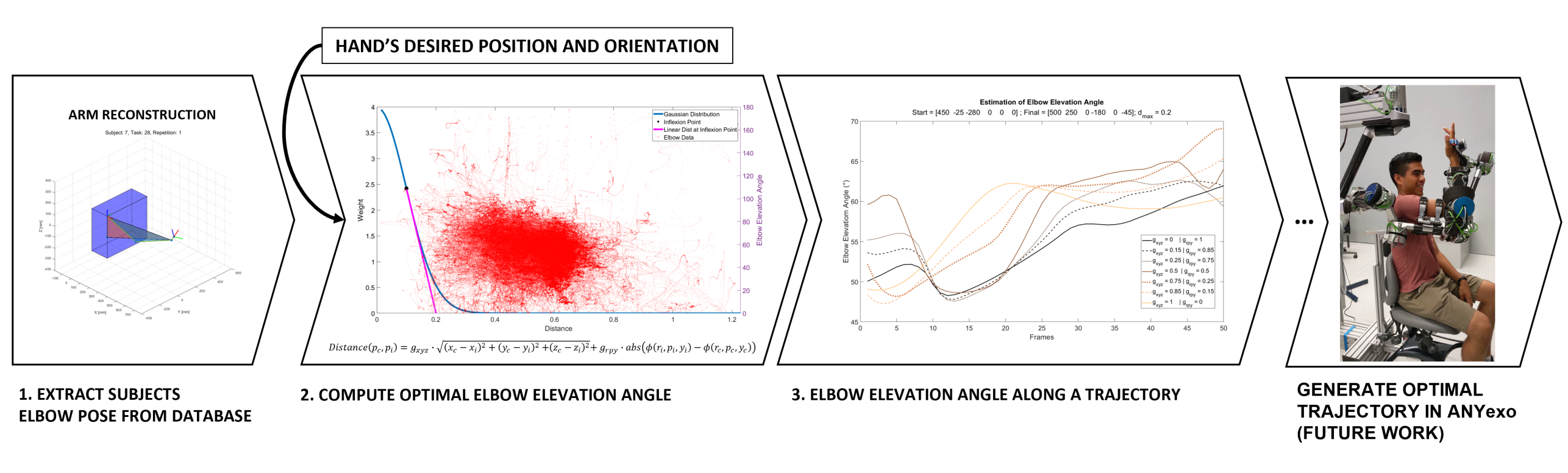
The way we pose our arms is very natural for us. However, there is a kinetic redundancy of the elbow due to the degrees of freedom (DOF) at the shoulder joint. This leads to multiple possible positions for the elbow when doing the exact same activity. My contribution during this internship was the creation of a function to estimate the optimal elevation angle of the elbow at a given position and orientation of the hand. This function is intended to be used in the ANYexo. Since the ANYexo fulfills all the DOF of the human arm, it is desired to solve the elbow redundancy. To achieve this, a dataset with kinematic data of humans performing activities of daily life using their arm was analyzed. The arm of each subject was reconstructed with the purpose of calculating the elevation of the elbow in every posture they took during each one of the tasks. A function was developed in such a way that it considers both the desired orientation and cartesian position for the hand, or end effector in the case of an exoskeleton. Depending on the given weight to each of the parameters, an optimal elbow elevation angle was computed and extracted from the preprocessed data of the subjects. The obtained results are the first steps for the generation of human-like trajectories in exoskeletons such as the ANYexo.

"RSF was an exciting experience where I was able to learn something new every day and put my skills into practice. The dynamic work environment and the amazing mentorship at the ETH Computational Robotics Lab have given me a renewed perspective on approaching robotics challenges, for which I am very grateful."
Research Overview
During the course of RSF, I worked at the CRL on investigating how bioinspired robot designs can be augmented and optimised for 3D printing. 3D printing allows for more freeform structures to be built while still lowering the cost, complexity, and waste production compared to more traditional manufacturing methods. While leveraging these benefits for robotic design would be an ideal scenario, current rapid prototyping technology is still quite far from achieving purely 3D printable robots. Nevertheless, this study aims to take a step forward in this direction by developing a design pipeline that can allow us to recreate animal motion patterns predominantly using 3D-printed parts. We also explored the possibility of replacing a portion of the robot's actuation with passive 3D printable spring and tendon combinations. As a case study, we used this methodology to augment the design of an avian robot (based on the gait patterns of ratite birds such as emus and ostriches) built by researchers at the Max Planck Institute for Intelligent Systems. The avian limb was 3D printed with added modular planar and spiral spring attachments to imitate the characteristic leg clutching stance of ratite birds. The augmented prototype showed an efficient passive return to a neutral stance by unloading the spring mechanisms and demonstrated the potential of using such design concepts to enhance the capabilities of 3D printed structures.
"RSF provided me with an extraordinary journey of learning from and working with leading researchers in the CVG group at ETH. This experience further increased my passion for robots and strengthened my determination to dive into this field. Great thanks to my supervisors in CVG and the organizers of this great program."
Research Overview
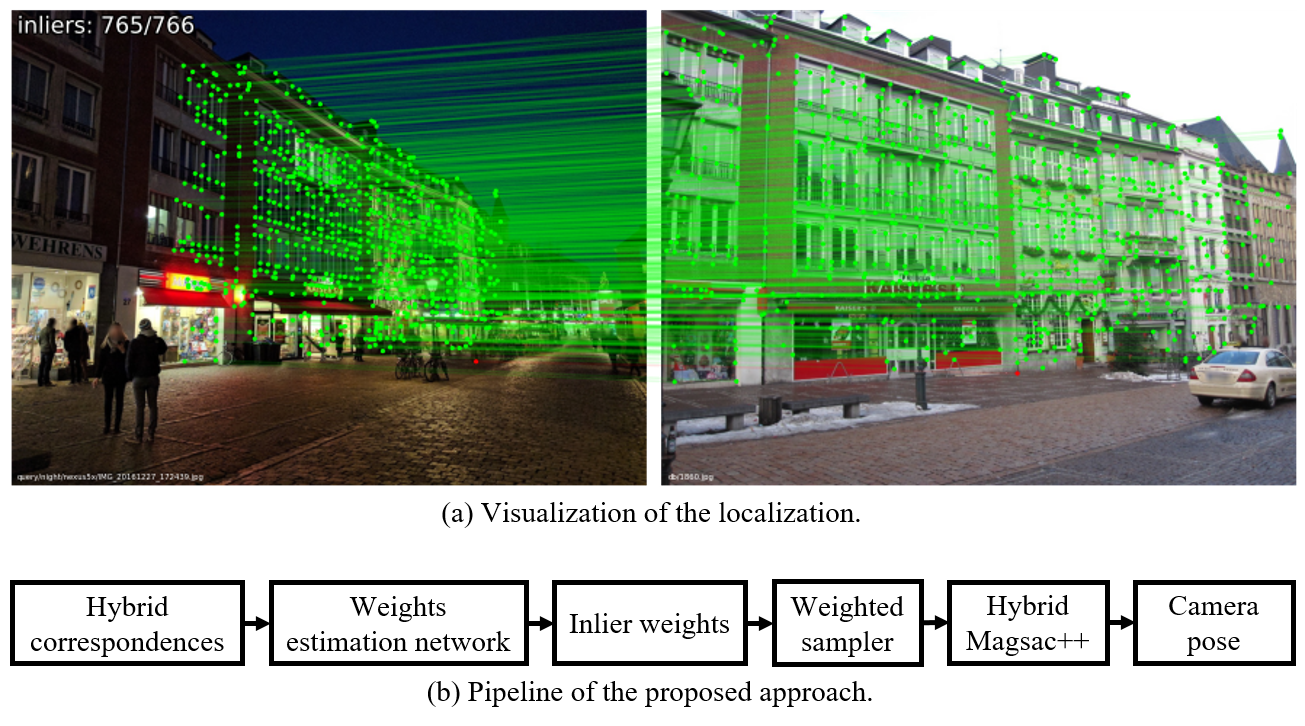
Previous works in camera pose estimation were generally conducted using solely 2D-2D or 2D-3D correspondences, which suffer from time-consuming optimization or inaccurately triangulated points, respectively. Moreover, the classic RANSAC algorithm with random sampling in these approaches can easily lead to inaccurate estimation due to disrupting outliers, while existing outlier-free sampling strategies focus on 2D-2D correspondence learning only. In concern of these drawbacks, this work proposes to perform pose estimation exploiting both 2D-2D and 2D-3D matches simultaneously, in which a novel hybrid correspondence learning approach for outlier rejection is presented. Specifically, we first develop a learning-based model for outlier rejection of 2D-3D correspondences, with the number of duplicated observations of each correspondence as side information. Preliminary experiments show that our 2D-3D correspondence learning realizes a favorable improvement for 2D-3D solvers. On this basis, a novel hybrid correspondence learning approach is proposed to consider 2D-2D and 2D-3D samples integrally, which significantly facilitates the accuracy of correspondence ranking and thus leads to more precise camera pose estimation.